Основные конструктивные особенности
Универсальный токарно-винторезный станок состоит из основных конструктивных узлов, которые являются типовыми элементами. К ним относятся:
- суппорт;
- станина;
- упорная и шпиндельная бабки;
- электрическое оборудование;
- ходовой вал;
- гитары шестерен;
- коробка, которая обеспечивает выбор и смену подач;
- ходовой винт – именно эта деталь отличает токарно-винторезный от стандартного токарного станка.
В зависимости от некоторых особенностей может различаться точность станка. Поэтому универсальное оборудование может быть как класса точности Н, так и повышенного – П.
Передние и задние бабки
У передней или шпиндельной бабки есть основная роль – фиксировать заготовку в обработке и передавать вращение заготовке от электрического двигателя.
Внутри корпусной части бабки расположен шпиндель. На корпусе станка снаружи монтируется рукоятка регулировки скорости. Задняя бабка или упорная необходима для фиксации заготовки.
Суппорт
Суппорт предназначен для того, чтобы перемещать резцедержатель с резцом в продольном, поперечном направлении по отношению к оси станка. Нижняя часть суппорта именуется салазками или кареткой.
Спустя определенное время работы станка суппорт будет нуждаться в регулировке, поскольку, в противном случае снизится скорость обработки. Регулировка от зазоров заключается в подтягивании клиновой планки.
По сравнению с другими деталями суппорт имеет большие размеры. Выбор резцедержателя определяется классом станка. Для крупногабаритного оборудования обязательно закреплять резцы дополнительно четырьмя винтами.
Коробка скоростей
Это основная часть привода шпинделя. Она осуществляет передачу энергии двигателя остальным частям станка. Еще одна функция – изменение частоты вращения шпинделя и скорости работы всего станка.
Коробка встраивается в корпус бабки шпинделя или в отдельном корпусном блоке. Изменение скорости может происходить бесступенчатым или ступенчатым способом. В стандартную коробку передач входят следующие составляющие:
- система зубчатых передач;
- клиноременная передача;
- реверсивный электродвигатель;
- электромагнитная муфта с системой торможения;
- рукоять для переключения скоростей.
Работает коробка скоростей за счет шестерен.
Шпиндель
Это основная часть станка, которая сделана в виде вала с конусным отверстием для закрепления заготовок. Чтобы деталь имела высокую прочность и долговечность, ее изготавливают из высокопрочной стали.
В классическом варианте шпиндель сделан на высокоточных подшипниках качения. На опоре детали установлено специальное кольцо, которое обеспечивает точность работы станка.
На торце конструкции расположено коническое отверстие. Полость шпинделю необходима, чтобы установить пруток, помогающий при необходимости выбивать центр из посадочного места.
Непосредственно прочность и долговечность шпинделя зависит от имеющихся там подшипников.
Станина
Это основная часть станка, которая выполнена с помощью чугунного литья. К ней прикреплены все наиболее важные детали и элементы данной конструкции.
Сама станина состоит из двух стальных балок. Балки, в свою очередь, соединены между собой ребрами жесткости. У каждой из балок – соединение к двум направляющим.
Направляющие с обоих сторон относятся к призматической группе. Направляющая плоской формы расположена внутри с левой стороны.
Нарезание резьбы
Нарезать резьбу при помощи токарно-винторезного станка можно несколькими способами. Для этого используется плашка, метчик, резец и другие виды инструмента.
С их помощью есть возможность нарезать внутреннюю и внешнюю резьбу
При использовании резца важно соблюдать полностью технологию. Она включает:
- правильную заточку резца;
- аккуратную настройку режимов работы станка;
- при помощи шаблона правильная установка резца по центру детали;
- замер полученных размеров калибрами или шаблонами.
В такой работе недопустим брак в виде заострений, рваных нитей, задир и дробления.
Электрический блок управления
В стандартный блок управления токарно-винторезным станком входит сразу несколько рукояток и кнопок:
- рукоятка для настройки количества оборотов;
- система управления для установки параметров резцовой поверхности;
- рукоятки для управления суппортом.
Станок с ЧСПУ обладает более сложным устройством, но при этом может работать без участия оператора на промежуточных этапах.
Фартук
В фартуке токарно-винторезного станка расположены механизмы, которые преобразуют вращательное движение ходового винта и ходового вала в поступательное движение суппорта.
Нормативные документы
УГО элемента выполняют без дополнительных полей или без правого или левого дополнительного поля, в следующих случаях: все выводы логически равнозначны; функции выводов однозначно определяются функцией элемента.
Допускается отделять такие элементы друг от друга штриховой линией черт.
Это обозначение используют для ссылок в текстовых документах и для нанесения на объект. При выпуске на изделие установку нескольких схем определенного вида и типа в виде самостоятельных документов допускается в наименовании схемы указывать название функциональной цепи или функциональной группы например, схема электрическая принципиальная привода, схема электрическая принципиальная цепей питания; схема гидравлическая принципиальная привода, схема гидравлическая принципиальная смазки, схема гидравлическая принципиальная охлаждения. Переключатель однополюсный шестипозиционный с безобрывным переключателем 3.
Разобравшись с электрическими схемами, можем переходить к обозначениям указанных на них элементов. Для указания дополнительных функциональных возможностей конкретного контакта стандартом предусмотрено использование специальных знаков наносимых на изображение подвижной части контакта.
2 Нормативные ссылки
Применение на схемах тех или иных УГО определяют правилами выполнения схем определенного вида и типа. Дополнительно с буквенным обозначением указывается одна или несколько цифр, обычно они поясняют параметры. В надписях на схемах не должны применяться сокращения слов, за исключением общепринятых или установленных в стандартах.
Порядок следования меток определяет логический уровень разрешающего сигнала: первая функция осуществляется при LOG1, вторая — при LOG0. Если одинаковые элементы или устройства находятся не во всех цепях, изображенных однолинейно, то справа от позиционного обозначения или под ним в квадратных скобках указывают обозначения цепей, в которых находятся эти элементы или устройства см.
Примечания к пп. Обязательными являются только метки открытого выхода и выхода с тремя состояниями.
Расстояние между соседними параллельными линиями взаимосвязи должно быть не менее 3,0 мм. Обозначения электромеханических приборов и контактных соединений Примеры обозначения магнитных пускателей, реле, а также контактов коммуникационных устройств, можно посмотреть ниже. Схематическое изображение плавкого предохранителя. Как нарисовать розетки, выключатели и лампы на плане квартиры.
Кинетическая схема других механизмов
Кинематика — наука, изучающая различные конструкции, поэтому для любого типа оборудования схема своя. Рассмотрим чертеж наиболее часто встречаемого агрегата — станка. Конечно, существует целый ряд других механизмов, и на изучение их схем может уйти масса времени. Изображения сложных конструкций более детально рассматриваются учеными, механиками и любителями кинематики.
Станок — простой пример механизма, который приводится в действие благодаря определенным силам. Исполнительными органами конструкции являются: стол, суппорт, шпиндель и другие детали. Цепи кинематики станка состоят из различных передач, которые размещены в определенной последовательности. Кинематические схемы передач могут иметь в своем составе ременные, зубчатые или червячные механизмы. На чертеже все элементы обозначаются специальными знаками, которые прописаны в ГОСТе 3462-61. Кинематическая схема станка обязательно включает в себя шаги ходовых винтов, модули захода червяков, число оборотов двигателей, мощность и т. д.
Современное оборудование имеет не только механические передачи, зачастую применяют гидравлические или пневматические устройства, и, соответственно, в паспортах станков можно встретить не кинематические схемы, а комбинированные пневмогидравлические или электрические.
Современный мир машин и деталей огромен, существуют тысячи разнообразных механизмов и элементов. Однако каждый механический агрегат имеет свою кинематическую схему, будь то кран, подвеска автомобиля, металлорежущий станок или буровая вышка. Кинематические чертежи и конструкторские описания помогают разобраться со структурой и составом механизмов, облегчают процесс изучения движения элементов и звеньев в цепи. Благодаря таким схемам и науке кинематике в целом научно-технический прогресс не стоит на месте, появляются все более совершенные механизмы, станки и агрегаты, которые активно входят в нашу с вами жизнь.
Старые советские модели станков по дереву и металлу
Советское оборудование все еще эксплуатируется на производстве. Некоторые принципиально предпочитают оборудовать домашние мастерские агрегатами из СССР.
Важно!
На советское оборудование иногда проблемно найти оснастку или комплектующие в случае поломки.
Токарно-винторезный станок ИТ-1М
Станок облегченного типа предназначался для наработки практики в мастерских. Позволяет обрабатывать цилиндрические заготовки снаружи, сверлить и растачивать, нарезать резьбу. В настоящее время снят с производства.
Токарно-винторезный станок ТВ-6
Появился на рынке в 80-х годах. Применяется в основном для обучения будущих токарей в мастерских и учебных центрах. Позволяет выполнять базовые операции.
Характеристики:
- Диаметр шпинделя — 12 мм.
- Частота вращения шпинделя — 130-170 об./мин.
- Расстояние между центрами — 350 мм.
- Максимальная длина обработки — 300 мм.
Токарные станки Универсал 2 и Универсал 3
Настольные станки для изготовления мелких деталей. Возможно выполнение большинства токарных работ. Максимальный диаметр и длина заготовки — 12,5 см и 18 см.
Токарный станок ТШ-3
Выполняет функцию точильного и шлифовального агрегата. Пригоден к эксплуатации в домашней мастерской и промышленных целях. Кроме классических токарных работ, агрегат пригоден для финишной шлифовки изделий и заточки режущих, а также слесарных инструментов.
1Е61М, 1Е61ПМ, 1Е61ВМ токарно-винторезные станки
Относятся к специальным станкам, обеспечивающим более высокую точность обработки. Все три модификации относятся к токарно-винторезной группе с высотой над центрами 175 мм.
Диаметр обрабатываемого прутка не превышает 32 мм. Максимальное расстояние перемещения суппорта составляет 200 мм.
Токарно-винторезный станок 1М63Н
Многофункциональный агрегат, предназначенный для выполнения всех типов токарных операций. Данная модель позволяет также работать с коническими поверхностями и нарезать многозаходные резьбы.
Буква Н в маркировке говорит о способности получить размеры нормальной точности. Возможна установка дополнительной оснастки при работе с крупногабаритными заготовками.
Токарно-револьверный станок 1341
Станок револьверной группы позволяет выполнять обработку с использованием нескольких инструментов одновременно. Доступные операции:
- Обработка наружных и внутренних поверхностей.
- Нарезка резьбы.
- Сверловка, зенкование, развертывание.
- Работа с фасонными поверхностями.
Обработка выполняется в автоматическом и полуавтоматическом режиме. Возможно изготовление деталей из прутка и штучных заготовок.
Токарно-винторезный станок 1Н65
Усовершенствованная модификация агрегата 1М65. Возможна обработка цилиндрических и конических деталей, а также сложных фасонных поверхностей.
Технические характеристики:
- Высота центра над станиной и суппортом — 500 и 325 мм.
- Диаметр шпинделя — 128 мм.
- Максимальный вес заготовки — 5 т.
- Максимальный диаметр заготовки в кулачках — 870 мм.
Токарно-винторезный станок 1М63
Разработан в 50-х годах для обработки заготовок из разного металла. По тем временам это был агрегат с уникальными характеристиками, и его закупали крупные промышленные предприятия. Он обеспечивал высокое качество и точность обработки при точении изделий любой сложности.
Станок токарно-винторезный 1А616
Агрегат выпущен в 50-х годах прошлого века. В ту эпоху технические характеристики были одними из лучших. На многих предприятиях станок успешно используется по сей день.
Оборудование предназначено для широкого спектра работ с небольшими заготовками. Буква А говорит про особо высокую точность обработки. Возможно нарезание модульной, дюймовой, питчевой резьбы без перестройки кинематики.
Токарный школьный станок ТВ-4
Разрабатывался для обучения токарному делу в школьных мастерских и учебных центрах. Универсальный станок, пригодный для выполнения базовых токарных операций. Имеет небольшой вес и габариты, из-за чего пользуется популярностью в домашних мастерских.
Токарный станок по металлу Школьник ТВ-7
Станок с ручным управлением, предназначен для обработки заготовок 100-300 мм. Поддерживает четыре скоростных режима. Позволяет выполнять базовые операции — наружное точение, расточка, нарезка метрической резьбы, обработка торца, сверление отверстий. Назначение — практическое обучение будущих токарей.
Настольный токарный станок по металлу ТВ-16
Станок с малыми габаритами для выполнения операций средней сложности. Доступно сверление отверстий, нарезка резьбы, наружное точение, расточка.
Параметры:
- Расстояние между центрами — 250 мм.
- Максимальный диаметр заготовки над станиной — 160 мм.
- Диаметр отверстия шпинделя — 18 мм.
- Мощность — 0,4-0,5 кВт.
ПРИЛОЖЕНИЕ
Таблица 1
Буквенные коды наиболее распространенных групп элементов
Буквенный код | Группа элементов механизмов | Примеры элементов |
А | Механизм (общее обозначение) | |
В | Валы | |
С | Элементы кулачковых механизмов | Кулачок |
Толкатель | ||
Е | Разные элементы | |
Н | Элементы механизмов с гибкими звеньями | Ремень |
Цепь | ||
К | Элементы рычажных механизмов | Коромысло |
Кривошип | ||
Кулиса | ||
Шатун | ||
М | Источник движения | Двигатель |
Р | Элементы мальтийских и храповых механизмов | |
Т | Элементы зубчатых и фрикционных механизмов | Зубчатое колесо |
Зубчатая рейка | ||
Зубчатый сектор | ||
Червяк | ||
X | Муфты, тормоза | |
У |
Таблица 2
Рекомендуемая форма перечня элементов
Зона | Позиц. обозначение | Наименование | Количество | Примечание |
Таблица 3
Примерный перечень основных характеристик и параметров кинематических элементов
Наименование | Данные, указываемые на схеме |
1. Источник движения (двигатель) | Наименование, тип, характеристика |
2. Механизм, кинематическая группа | Характеристика основных исполнительных движений, диапазон регулирования и т.д. |
Передаточные отношения основных элементов. | |
Размеры, определяющие пределы перемещений: длину перемещения или угол поворота исполнительного органа. | |
Направление вращения или перемещения элементов, от которых зависит получение заданных исполнительных движений и их согласованность. | |
Допускается помещать надписи с указанием режимов работы изделия или механизма, которым соответствуют указанные направления движения. | |
Примечание. Для групп и механизмов, показанных на схеме условно, без внутренних связей, указывают передаточные отношения и характеристики основных движений | |
3. Отсчетное устройство | Предел измерения или цена деления |
4. Кинематические звенья: | |
а) шкивы ременной передачи | Диаметр (для сменных шкивов – отношение диаметров ведущих шкивов к диаметрам ведомых шкивов) |
б) зубчатое колесо | Число зубьев (для зубчатых секторов – число зубьев на полной окружности и фактическое число зубьев), модуль, для косозубых колес – направление и угол наклона зубьев |
в) зубчатая рейка | Модуль, для косозубых реек – направление и угол наклона зубьев |
г) червяк | Модуль осевой, число заходов, тип червяка (если он не архимедов), направление витка и диаметр червяка |
д) ходовой винт | Ход винтовой линии, число заходов, надпись «лев», – для левых резьб |
е) звездочка цепной передачи | Число зубьев, шаг цепи |
ж) кулачок | Параметры кривых, определяющих скорость и пределы перемещения поводка (толкателя) |




![§ 3. кинематика металлорежущих станков [1968 орнис н.м. - основы механической обработки металлов]](https://benzo-electro-instrument.ru/wp-content/uploads/2/3/0/23057ea9d31d996d66d19e9d1458c2da.jpeg)

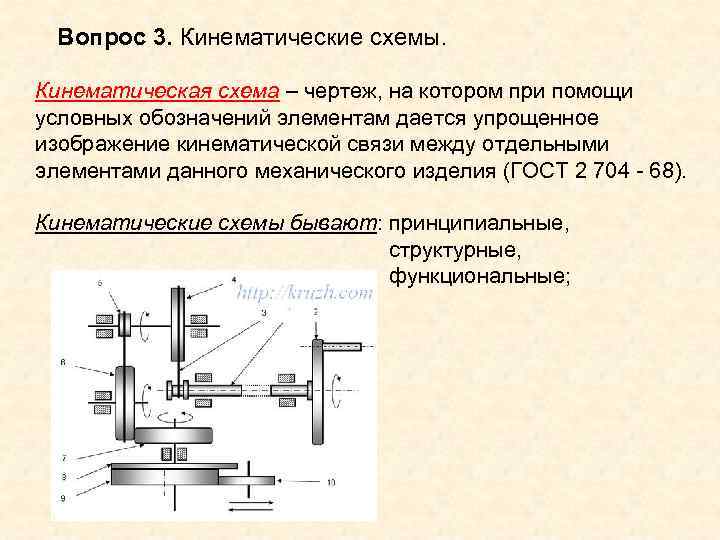
Что такое схема кинематическая? Основные понятия
Если коротко ответить на этот вопрос, то кинематическая схема — это некий рисунок или документ, если так можно выразиться, на котором изображены все механические звенья с указанием размеров. Очень часто звенья схемы называют кинематическими парами. Если дать определение научным языком, то это сопряженные твердые элементы в количестве 2 штук, которые благодаря условиям связи ограничивают движение друг друга.
Наличие размеров необходимо для проведения кинематического анализа, который изучает основы движения механизмов, их траектории и скорости. Решить задачи кинематики можно как графически, так и экспериментально.
В общем, о кинематической схеме мы говорим тогда, когда анализируем тип механизма. Им называют некую систему тел, которая преобразует движение одних для требуемого движения других. В состав любого механического элемента входят звенья — несколько твердых частиц, жестко соединенных между собой. Звено, которое считают неподвижным, называют стойкой.
Элементом кинематической пары или звена называют систему поверхностей и линий, по которой одно звено соприкасается с другим. Эту точку еще именуют узлом сопряжения.

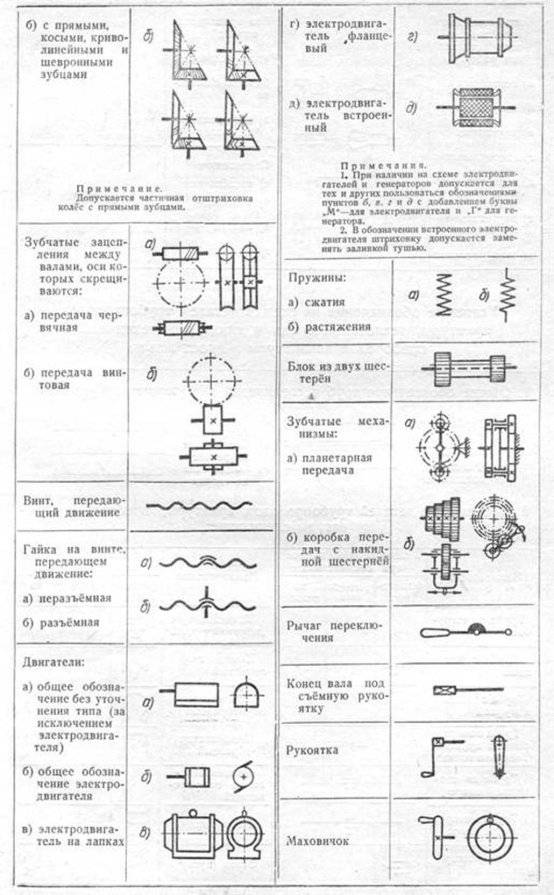
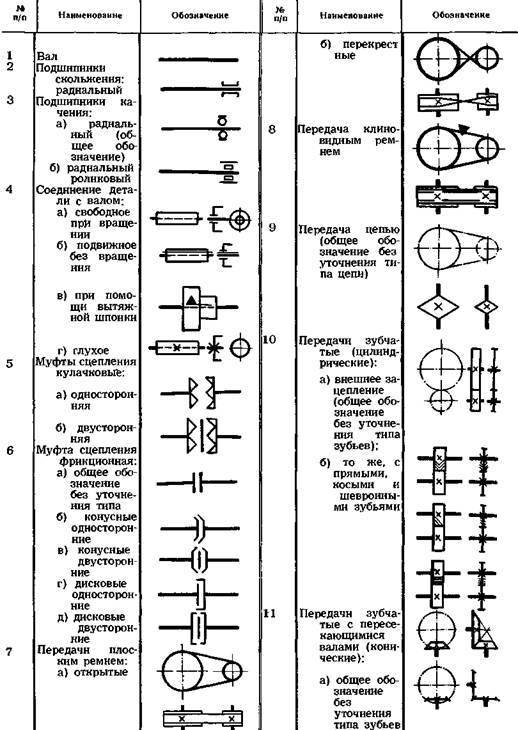
Условные обозначения элементов на кинематических схемах станков
Условные обозначения элементов на кинематических схемах станков
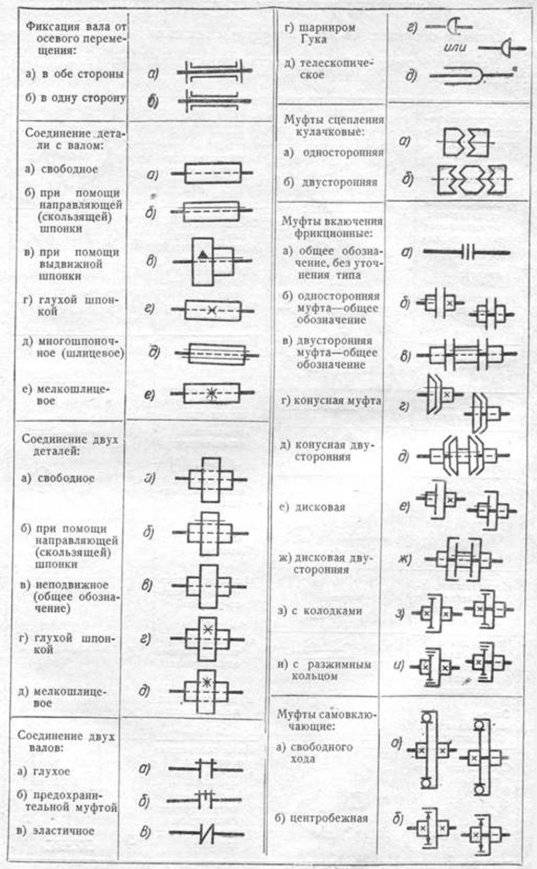
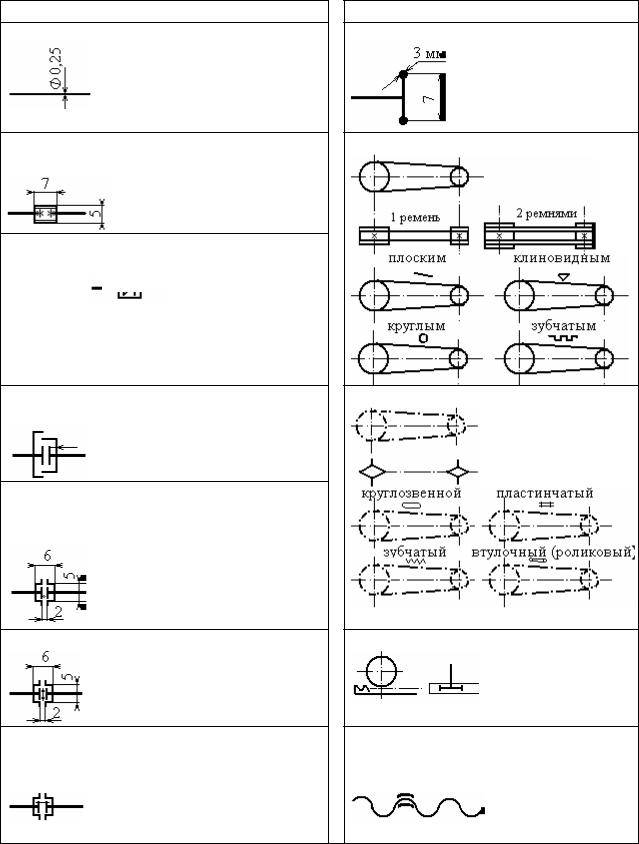
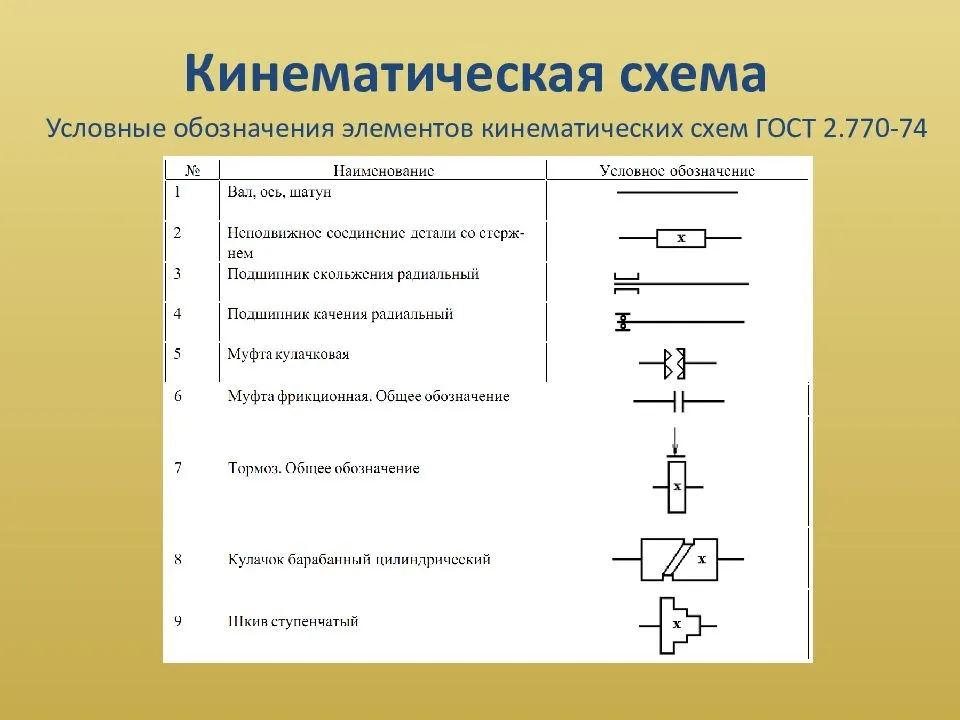
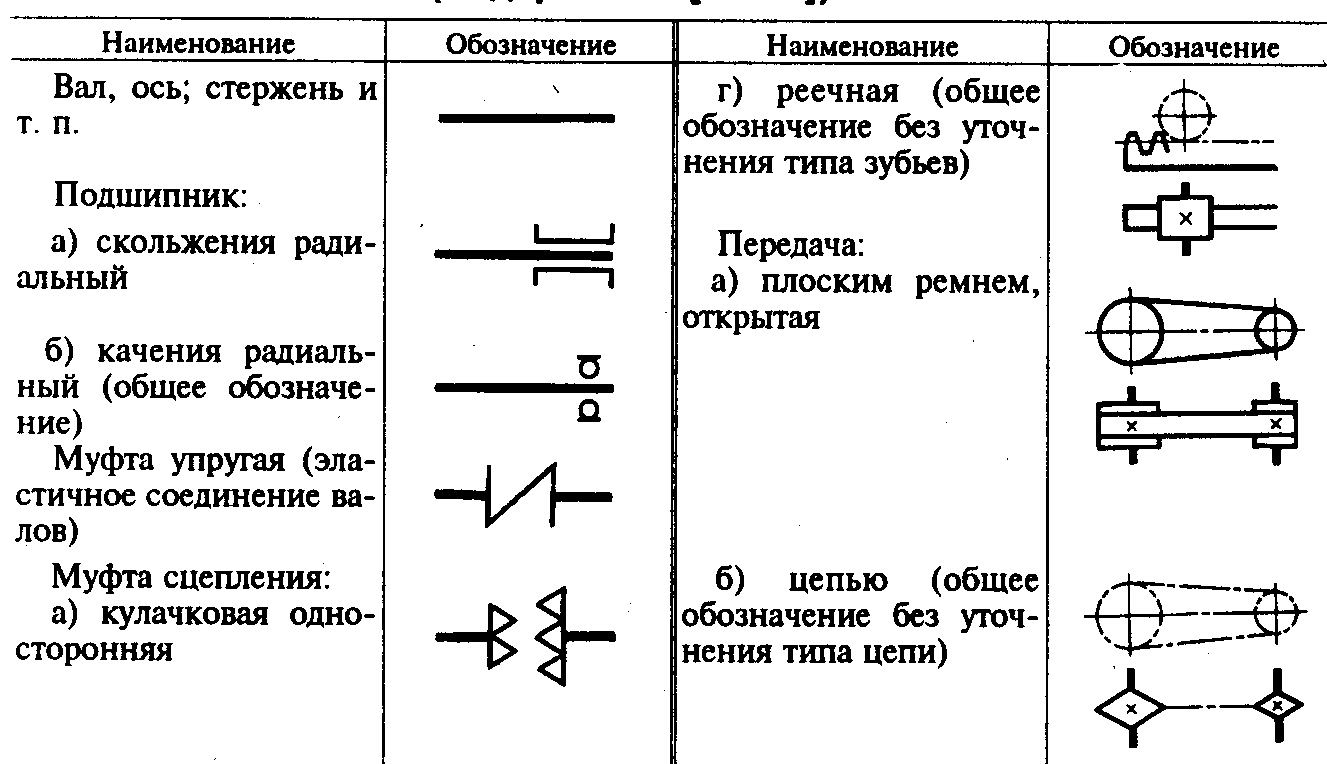
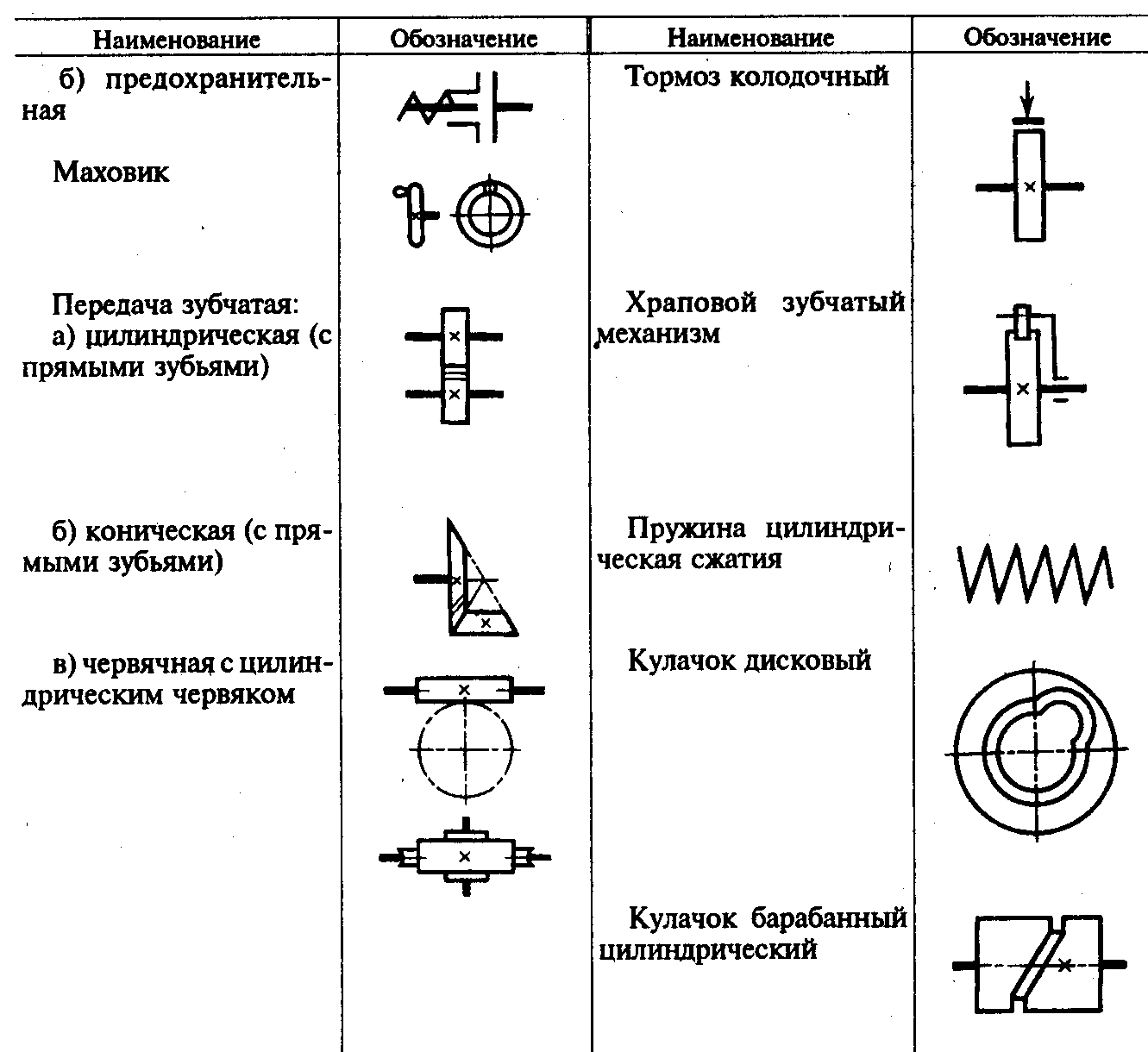
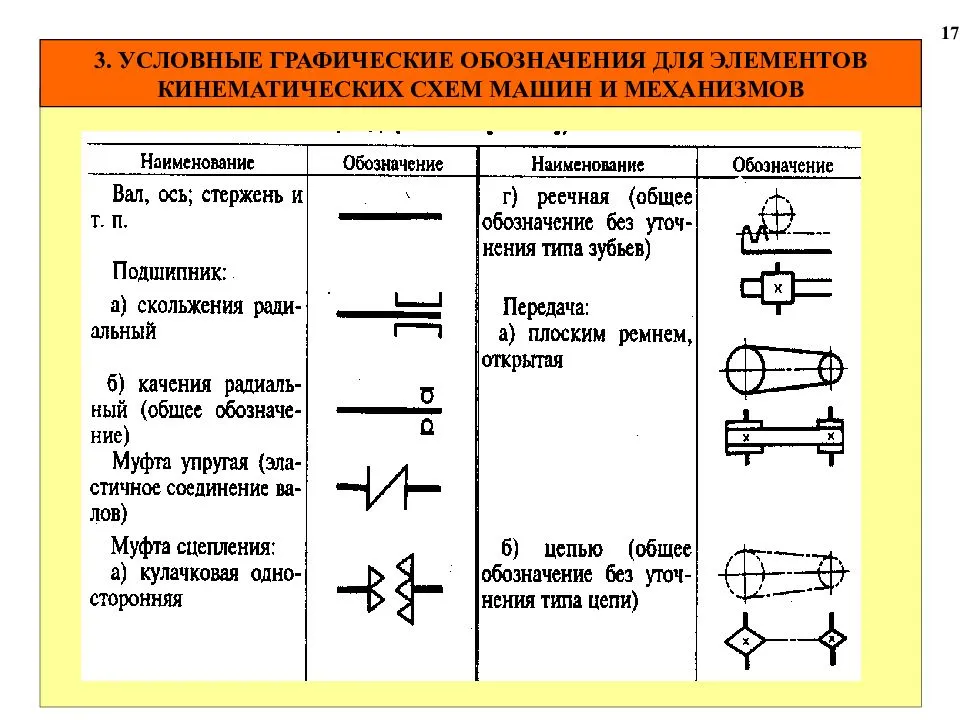
В машиностроение при вычерчивании различных кинематических схем используют условные обозначения их элементов, утвержденные ГОСТ 2.770-68, ГОСТ 2.782-68 и ГОСТ 2.782-68 (таблица 1).Таблица 1 — Условные обозначения элементов кинематических схем
| Наименование | Тип | Условные обозначения |
| Подшипники скольжения и качения на валу без уточнения типа | – радиальные | |
| – упорные | ||
| Подшипники скольжения | – радиальный | |
| – радиально-упорный односторонний | ||
| – радиально-упорный двусторонний | ||
| – упорный односторонний | ||
| – упорный двусторонний | ||
| Подшипники качения | – радиальный | |
| – радиально-упорный односторонний | ||
| – радиально-упорный двусторонний | ||
| – упорный односторонний | ||
| – упорный двусторонний | ||
| Муфта | (общее обозначение без уточнения типа) | |
| Муфты нерасцепляемые (неуправляемые) | – глухая | |
| – упругая | ||
| – компенсирующая | ||
| Муфты сцепляемые (управляемые) | – общее назначение | |
| – односторонняя | ||
| – двусторонняя | ||
| Муфты сцепляемые механические | – синхронная (например, зубчатая) | |
| – асинхронная (например, фрикционная) | ||
| Муфта сцепляемая электрическая | ||
| Муфта сцепляемая гидравлическая или пневматическая | ||
| Муфты автоматические (самодействующие) | ||
| – обгонная (свободного действия) | ||
| – центробежная фрикционная | ||
| – предохранительная с разрушающим элементом | ||
| – предохранительная с неразрушающим элементом | ||
| Тормоз | (общее обозначение без уточнения типа) | |
| Храповые зубчатые механизмы | – с наружным зацеплением (односторонний) | |
| – с внутренним зацеплением (односторонний) | ||
| Шкив ступенчатый, закрепленный на валу | ||
| Соединения детали с валом | – свободное вращение | |
| – подвижное без вращения | ||
| – с помощью вытяжной шпонки | ||
| – глухое | ||
| Передачи фрикционные | – с цилиндрическими роликами | |
| – с коническими роликами | ||
| – с коническими роликами регулируемыми | ||
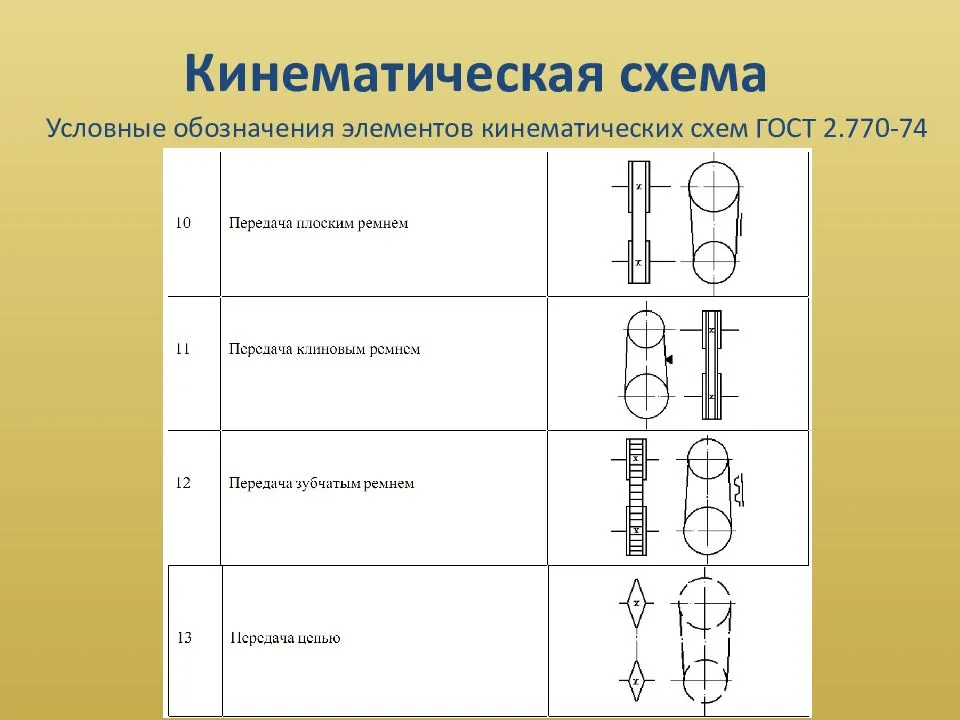
| Передачи ременные | – без уточнения типа ремня | |
| – плоским ремнем | ||
| – клиновидным ремнем | ||
| – круглым ремнем | ||
| – зубчатым ремнем | ||
| Передача цепью | (общее обозначение без уточнения типа цепи) | |
| Передачи зубчатые цилиндрические с внешним зацеплением | – общее обозначение без уточнения типа зубьев | |
| – прямыми, косыми и шевронными зубьями | ||
| Передачи зубчатые цилиндрические с внутренним зацеплением | – общее обозначение без уточнения типа зубьев | |
| Передачи зубчатые с пересекающимися валами | (конические без уточнения типа зубьев) | |
| Передачи зубчатые со скрещивающимися валами | (червячные с цилиндрическим червяком) | |
| Передачи зубчатые реечные | (общее обозначение без уточнения типа зубьев) | |
| Передачи зубчатые сектором | (общее обозначение без уточнения типа зубьев) | |
| Винт, передающий движение | ||
| Винт – гайка качения | ||
| Винт – гайка скольжения | – гайка неразъемная | |
| – гайка разъемная | ||
| Электродвигатель | ||
| Насос | (без уточнения типа) |
ПРИЛОЖЕНИЕ. Буквенные коды наиболее распространенных групп элементов; Рекомендуемая форма перечня элементов; Примерный перечень основных характеристик и параметров кинематических элементов;
ПРИЛОЖЕНИЕ
Таблица 1
Буквенные коды наиболее распространенных групп элементов
Буквенный код | Группа элементов механизмов | Примеры элементов |
А | Механизм (общее обозначение) | |
В | Валы | |
С | Элементы кулачковых механизмов | Кулачок |
Толкатель | ||
Е | Разные элементы | |
Н | Элементы механизмов с гибкими звеньями | Ремень |
Цепь | ||
К | Элементы рычажных механизмов | Коромысло |
Кривошип | ||
Кулиса | ||
Шатун | ||
М | Источник движения | Двигатель |
Р | Элементы мальтийских и храповых механизмов | |
Т | Элементы зубчатых и фрикционных механизмов | Зубчатое колесо |
Зубчатая рейка | ||
Зубчатый сектор | ||
Червяк | ||
Х | Муфты, тормоза | |
У |
Таблица 2
Рекомендуемая форма перечня элементов
Зона | Позиц. обозначение | Наименование | Количество | Примечание |
Таблица 3
Примерный перечень основных характеристик и параметров кинематических элементов
Наименование | Данные, указываемые на схеме |
1. Источник движения (двигатель) | Наименование, тип, характеристика |
2. Механизм, кинематическая группа | Характеристика основных исполнительных движений, диапазон регулирования и т.д. |
Передаточные отношения основных элементов. | |
Размеры, определяющие пределы перемещений: длину перемещения или угол поворота исполнительного органа. | |
Направление вращения или перемещения элементов, от которых зависит получение заданных исполнительных движений и их согласованность. | |
Допускается помещать надписи с указанием режимов работы изделия или механизма, которым соответствуют указанные направления движения. | |
Примечание. Для групп и механизмов, показанных на схеме условно, без внутренних связей, указывают передаточные отношения и характеристики основных движений | |
3. Отсчетное устройство | Предел измерения или цена деления |
4. Кинематические звенья: | |
а) шкивы ременной передачи | Диаметр (для сменных шкивов – отношение диаметров ведущих шкивов к диаметрам ведомых шкивов) |
б) зубчатое колесо | Число зубьев (для зубчатых секторов – число зубьев на полной окружности и фактическое число зубьев), модуль, для косозубых колес – направление и угол наклона зубьев |
в) зубчатая рейка | Модуль, для косозубых реек – направление и угол наклона зубьев |
г) червяк | Модуль осевой, число заходов, тип червяка (если он не архимедов), направление витка и диаметр червяка |
д) ходовой винт | Ход винтовой линии, число заходов, надпись “лев.” – для левых резьб |
е) звездочка цепной передачи | Число зубьев, шаг цепи |
ж) кулачок | Параметры кривых, определяющих скорость и пределы перемещения поводка (толкателя) |



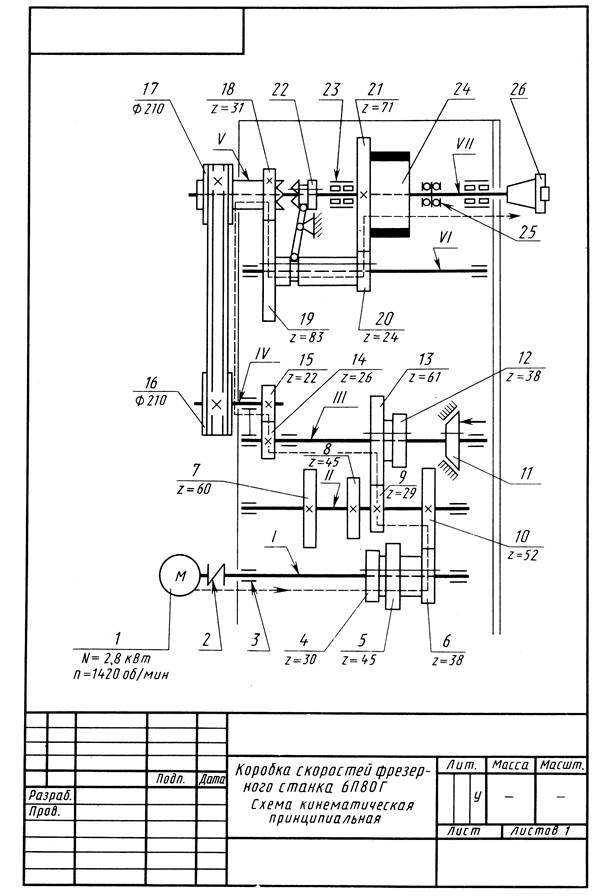
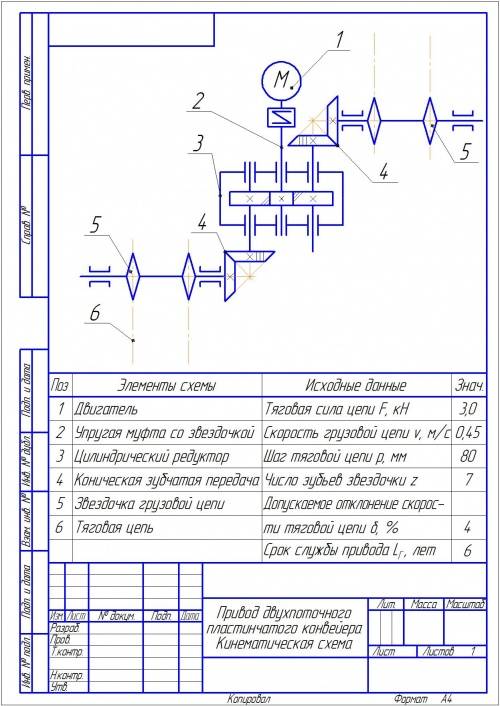
Пример выполнения кинематической схемы
РОССТАНДАРТ ФA по техническому регулированию и метрологии НОВЫЕ НАЦИОНАЛЬНЫЕ СТАНДАРТЫ: www.protect.gost.ruФГУП СТАНДАРТИНФОРМ предоставление информации из БД “Продукция России” : www.gostinfo.ruФА ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ система “Опасные товары” : www.sinatra-gost.ru
1.2. Кинематическая схема токарного станка
Кинематической схемой токарного станка называют условное изображение совокупности всех механизмов, посредством которых осуществляется движение элементов станка; она показывает взаимосвязь отдельных элементов и механизмов, участвующих в передаче движения различных органов станка.
В токарном станке имеются две кинематические цепи: электродвигатель — шпиндель (цепь главного движения) и шпиндель — суппорт (цепь подач), которые изображают в двух вариантах — для продольной (при нарезании резьбы и точении) и поперечной подачи резца.
Кинематическая цепь токарного станка может состоять из ряда кинематических пар зубчатых колес или шкивов, червячных и винтовых передач. Последовательность кинематических пар в цепи представлена цифрами, указывающими число зубьев в зубчатых колесах или диаметры шкивов. Для элементов кинематических пар, закрепленных на одном валу, цифры записывают через тире, а закрепленных на различных валах — через знак деления.
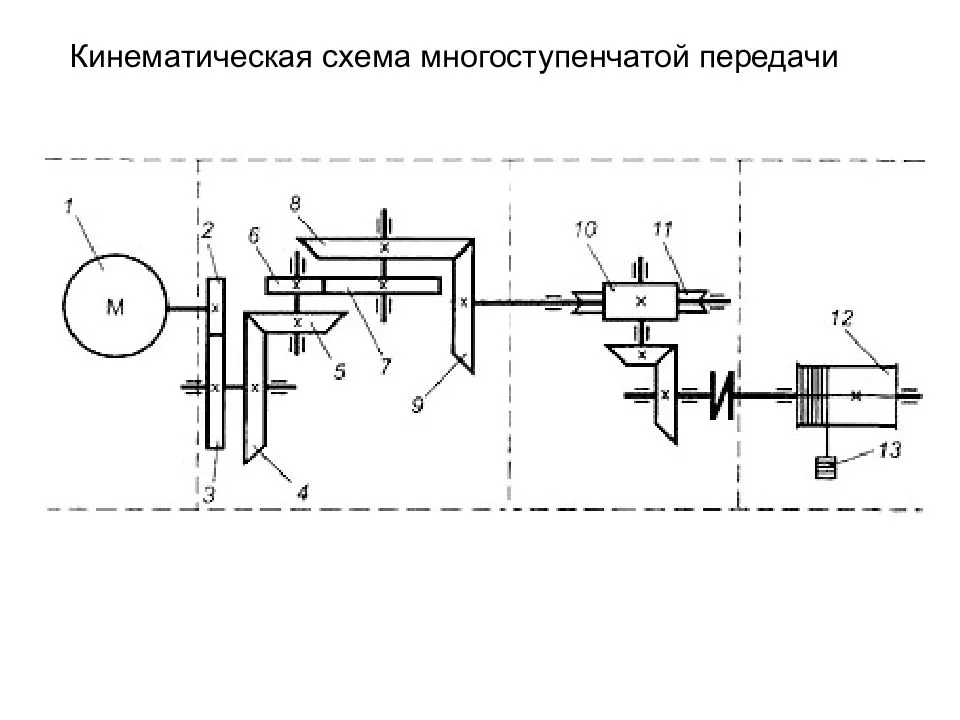
На рис. 9 приведена кинематическая схема токарно-винторезного станка. Проследим по ней кинематическую цепь главного движения: электродвигатель — шпиндель. Эта цепь связывает вал двигателя (диаметр шкива d1 = 142 мм) через клиноременную передачу со шкивом вала I (диаметр шкива d2 = 254 мм) коробки скоростей токарного станка, на котором свободно укреплен блок зубчатых колес 56—51 и зубчатое колесо 50. На валу находится также фрикционная пластинчатая муфта М1 для сообщения шпинделю прямого (при включении влево) или обратного (при включении вправо) вращения. При включении муфты М1 влево вращение с вала I передается на вал II. На нем помещается подвижной блок зубчатых колес Б1 (34—39), который, поочередно соединяясь с зубчатыми колесами блока 56—51, обеспечивает передачу различного числа оборотов валу II. Затем с этого вала при помощи подвижного блока Б2 (47—55—38) на валу VII и подвижного блока Б5 (43—54) на валу VII вращение передается на шпиндель (шесть чисел оборотов).
При включении перебора (валы IIV—V) движение с вала III передается валу IIV, который с помощью подвижных блоков Б3(88—45) и Б4(22— 45) передает его на вал V и затем через колеса 27 —54 на шпиндель (вал VII)’, дополнительно получаем три передаточных отношения. Структурная формула кинематической цепи имеет вид (об/мин):

где пшп и nдв — числа оборотов шпинделя и электродвигателя в минуту; iк с — переменное передаточное отношение коробки скоростей (с учетом передаточного отношения перебора); — коэффициент проскальзывания ремня ( = 0,98).

При положении зубчатых колес, изображенных на рис. 9, число оборотов шпинделя при прямом ходе
обIмин.
Токарно-винторезный станок 1К62 имеет 24 числа оборотов шпинделя (от 12,5 до 2000 об/мин).
Аналогично можно установить кинематическую цепь суппорта при продольной и поперечной подачах, а также при нарезании резьбы. Например, структурная формула для продольной подачи (мм/об):
sпр=l.iк п...m.z
где iк п — передаточное отношение коробки подач (с учетом передаточных отношений от шпинделя к реверсу, самого реверса, сменных зубчатых колес гитары и механизма фартука); т — модуль реечного зацепления, мм; г — число зубьев реечного колеса.
При положении зубчатых колес, изображенных на рис. 9, продольная подача
Всего станок имеет 48 продольных подач (от 0,075 до 4, 46 мм/об) и столько же поперечных (от 0,038 до 2,23 мм/об).
Анализируя кинематическую схему токарного станка и ее кинематические цепи, можно подобрать необходимую структурную формулу настройки станка для выполнения конкретной задачи.
Обозначение электрических элементов на схемах
Чтение схем невозможно без знания условных графических и буквенных обозначений элементов. Большая их часть стандартизована и описана в нормативных документах. Большая их часть была издана еще в прошлом веке а новый стандарт был принят только один, в 2011 году (ГОСТ 2-702-2011 ЕСКД. Правила выполнения электрических схем), так что иногда новая элементная база обозначается по принципу «как кто придумал». И в этом сложность чтения схем новых устройств. Но, в основном, условные обозначения в электрических схемах описаны и хорошо знакомы многим.
Неправильно, но наглядно и условные обозначения в электрических схемах не нужны
На схемах используют часто два типа обозначений: графические и буквенные, также часто проставляют номиналы. По этим данным многие сразу могут сказать как работает схема. Этот навык развивается годами практики, а для начала надо уяснить и запомнить условные обозначения в электрических схемах. Потом, зная работу каждого элемента, можно представить себе конечный результат работы устройства.
READ Масляные дугогасящие реакторы
кинематическая схема — это… Что такое кинематическая схема?
кинематическая схема кинематическая схема —
Тематики
энергетика в целом
Справочник технического переводчика. – Интент. 2009-2013.
- кинематическая система координат
- кинематическая схема механизма
Смотреть что такое «кинематическая схема» в других словарях:
- КИНЕМАТИЧЕСКАЯ СХЕМА — схема, на к рой с помощью условных обозначений изображаются звенья механизма и кинематические пары с указанием размеров, необходимых для кинематич. анализа (см. Кинематика) … Большой энциклопедический политехнический словарь
- кинематическая схема механизма — Структурная схема механизма с указанием размеров звеньев, необходимых для кинематического анализа механизма. [Сборник рекомендуемых терминов. Выпуск 99. Теория механизмов и машин. Академия наук СССР. Комитет научно технической терминологии. 1984… … Справочник технического переводчика
- кинематическая схема механизма — kinematic diagram of a mechanism Схема механизма, выполненная в масштабе. Шифр IFToMM: Раздел: СТРУКТУРА МЕХАНИЗМОВ … Теория механизмов и машин
- кинематическая схема механизма — Графическое изображение механизма с применением условных обозначений звеньев и кинематических пар и указанием размеров, необходимых для кинематического анализа механизма … Политехнический терминологический толковый словарь
- Принципиальная кинематическая схема — Кинематическая схема револьверной головки токарного станка При … Википедия
- Кинематическая пара — подвижное сопряжение двух твёрдых звеньев, налагающее ограничения на их относительное движение условиями связи. Каждое из условий связи устраняет одну Степень свободы, то есть возможность одного из 6 независимых относительных движений в… … Большая советская энциклопедия
- пусковая система — Рис. 1. Схема воздушной пусковой системы многодвигательного самолёта. пусковая система газотурбинного двигателя совокупность устройств, предназначенных для принудительной раскрутки ротора газотурбинного двигателя при его запуске. П. с.… … Энциклопедия «Авиация»
- пусковая система — Рис. 1. Схема воздушной пусковой системы многодвигательного самолёта. пусковая система газотурбинного двигателя совокупность устройств, предназначенных для принудительной раскрутки ротора газотурбинного двигателя при его запуске. П. с.… … Энциклопедия «Авиация»
- Манипулятор — Кинематическая схема одноручного манипулятора с пятью степенями свободы. Стрелками показаны направления возможных перемещений звеньев. МАНИПУЛЯТОР, 1) управляемый механизм, повторяющий движения (действия, манипуляции) руки человека при… … Иллюстрированный энциклопедический словарь
- Делительная головка — приспособление для станков (главным образом фрезерных), позволяющее периодически поворачивать обрабатываемое изделие на равные и неравные доли оборота. Различают Д. г. механические (в том числе простые и универсальные) и оптические.… … Большая советская энциклопедия
technical_translator_dictionary.academic.ru